After the success of the first iteration of the mechanical design I have now moved on to scaling the animatronic up to it's intended size.
During this second prototype I changed the type of motor from steppers to worm screw geared DC motors for the body section. These may not be as accurate but they have a far greater holding torque and consume less current. Because of this new addition I redesigned both the axle base and the axle mount show above and below.
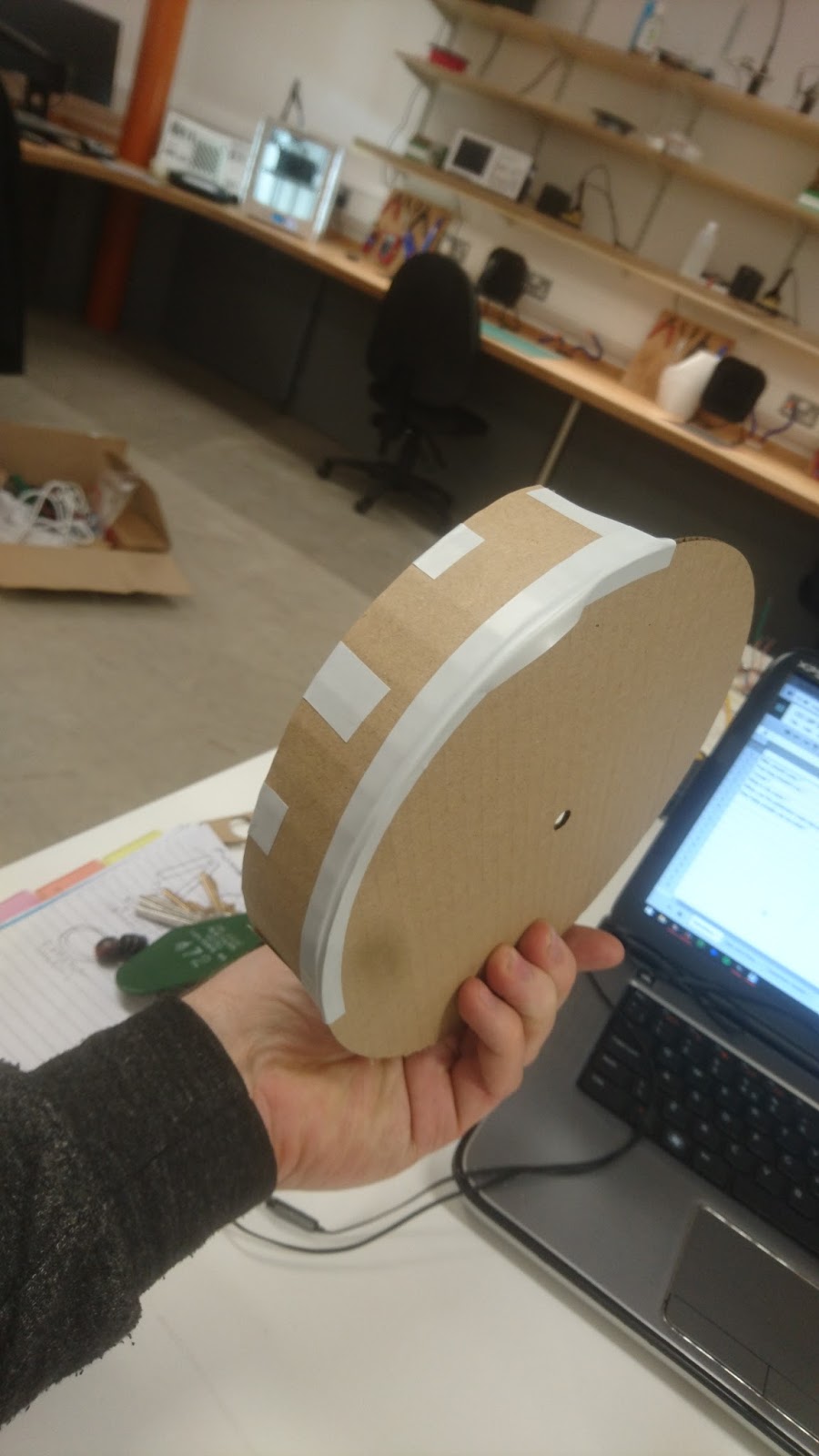
I attempted to increase the size of the head though after stress testing the weight I knew I had to return to its original diameter of 20 cm.
In the photo above you can see a four inch "Lazy Susan" bearing sandwiched between the two halves of the body and platform. This bearing givs the two halves stability and a smooth turning action. Though due to the bearing's construction I will have to replace it with a sturdier model.
Above is the large scale platform test.
Above is the large scale platform test.
Next I will be working on the "face", correcting the instability of the body and sourcing the appropriate batteries.
To test the mechanical integrity of my new design I set about cutting the pieces, not out of cardboard but with MDF.
Using stepper motors I was able to ascertain the structural compliance of the design and exactly what parts I would need to build a larger version.
As you can see from the above photo The axle is made up of two bearings sandwiched between two nylock nuts with a timing pulley that holds the timing belt in place. We have four angle brackets to keep it secure and downward facing stepper has a mounting hub attached to it to spin the body horizontally.
Above we have the fully assembled small scale version. This version was a success, the platform moved with ease and the body did not sway. I shall now move on to scaling the design up in size to test the limits of its stability.
As the design was decided I set about 3D modeling the different components of the animatronic. Using Fusion 360 I sketched out a rough version for each of the components so that they can be fabricated.
The axle mount with mounting holes for the motor and a press fit hole for a bearing at the top.
This base of the body that has cut outs for the axle mounts and a central mount for a motor.
The rough design of the "cornea" of the eye that will house the lenses.
The head of the animatronic. Intentionally simplistic so that weights can be attached for testing.
To get these models in the real world I took advantage of the university's Epilog M2 40 Laser Cutter. I was able to cut everything out of cardboard and construct a model.
During my motor tests I hit a brick wall. The weight of the body section was a far greater than I had first calculated and made it quite impossible for it to lower and raise.
After some consideration I knew that I had to change course before it was too late. I wanted to keep the concept of surveillance within the core design of the character but also reduce the articulation. This reduction of an axis of movement was a difficult challenge to face but below represents a collection of the sketches made in this new design process.
I decided to make the focus on the "head" of the robot, or in this case the "eye". This eye rotates 360 degrees clockwise and anticlockwise. The eye is an assembly of lenses attached to a disk held up with an axle.
The new design addresses the mechanical difficulties of the previous design while retaining much of the core character.
The next step is to build a working prototype which is scaled down. With this I will be able to build a working system that can by built at different scales. I can then find the limits of the system in terms of scale.
Below is a collection of sketches made during the design process.