The Idea
The idea for my third year project steamed from my passion for animatronics and the concept of telling a story about a positive effect AI could have on the world.I decided to build animatronic character to be used in a live play that I would write. The play follows a robot that was unhappy with it's original purpose and choose to become the conductor of a rural train station. Our two other characters, a human and a fox, find this station as a island away from their normal lives. Over the course of the play we follow the three characters and the friendships that they make and the knowledge the gain from these relationships. The conductor character will be the animatronic, the fox will be a traditional hand puppet and the human will be just an actor.
During this project I want to research, identify and build with affordable technology such as Arduino, custom circuitry and Raspberry Pi. I also want to answer the question "How can animatronics be used in theatre to create believable characters
which speak through movement alone using robotic motion on stage?". By combining these two efforts I believe that I can demonstrate that animatronics can not only be used in high budget film but also within the theatre world, no matter the production's level.
The Script
I started to write the script for the play in August of 2016. By the end of September I had a first draft. I used that draft to workshop and discuss with over the next period of weeks. It was at the end of October that the second draft was complete. It had been well rounded and fleshed out.
I opted to write my own play so that I could tell my own story but more importantly it was to dictate exactly what the robot was and what it could do. In an effort to reduce the complexity of the project I wrote in very few complete motor functions for the robot to perform. I did this so that I could focus on the essential movements I needed to convey the character to the audience and not get caught up on needless distractions.
The script is currently in still in it's second draft though it will be worked on during the rehearsal process to account for any new developments.
During the critique sessions of the script I invited actors, writers and technologists to read through and understand the play in terms of their individual expertise. I was able to adapt and polish the play based on their comments and advice.
Gathering the Crew
As December approached I knew that to keep the momentum going I needed to gather a crew together so that when the new term started we could hit the ground running. Already being an active member of Goldsmiths film and theatre community I was able to advertise my project effectively. One after another I met with sound and set designers, composers, stage managers, costume designers and lighting technicians. After much deliberation I selected my team and set about giving them research topics to study for the start of the new term once the winter break had concluded.
The team includes Amelie Iselin (stage manager), Erin Tomkins (composer), Elsie Oakwood (costume designer), Aiden O'Beirne (sound designer), Emma Sheldrick (set designer), Mila Lawlor (lighting designer) and Theo Mason Wood (puppet designer).
The Design of the Animatronic
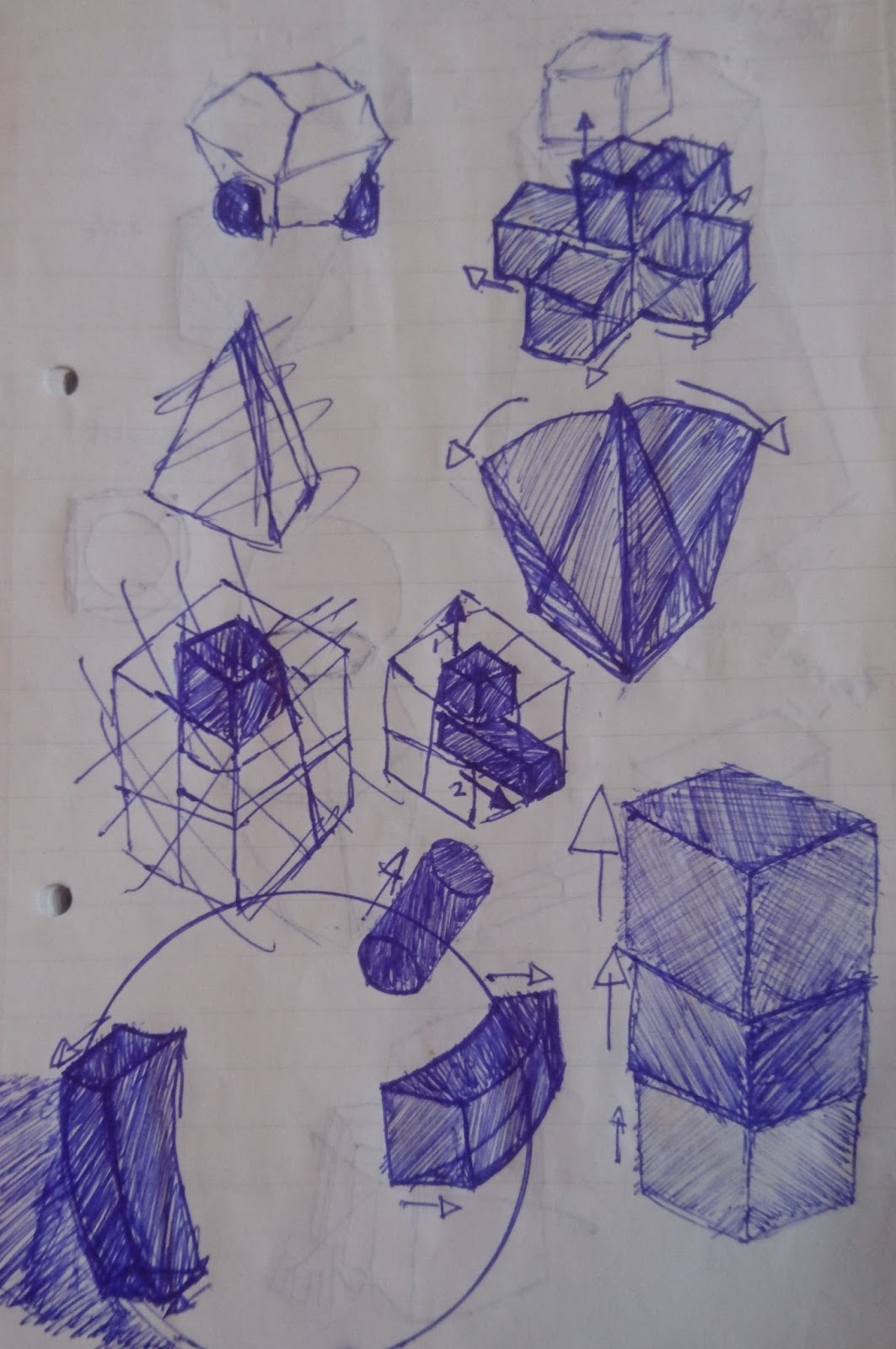
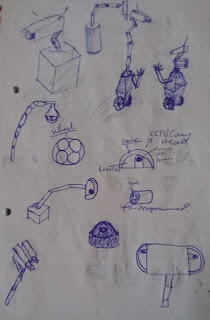
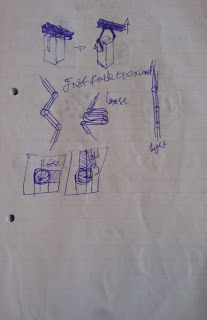
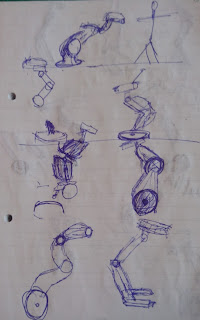
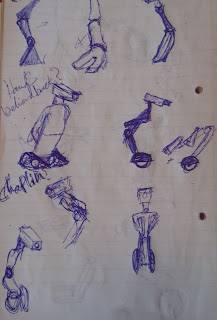
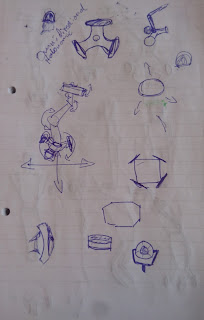
During this process I was working in collaboration with Karol Sielski, a design student at Goldsmiths College, to design the animatronic itself. We concluded that due to the time sensitive nature of the project and the budgetary constraints we would move away from humanoid forms. Instead we challenged ourselves by trying to design something with recognizable human traits and body language though without and or as little human physical features. Below is a selection of the sketches made over the design process of several months.
 |
| 1 |
 |
| 2 |
 |
| 3 |
 |
| 4 |
 |
| 5 |
 |
| 6 |
 |
| 7 |
 |
| 8 |
 |
| 9 |
 |
| 10 |
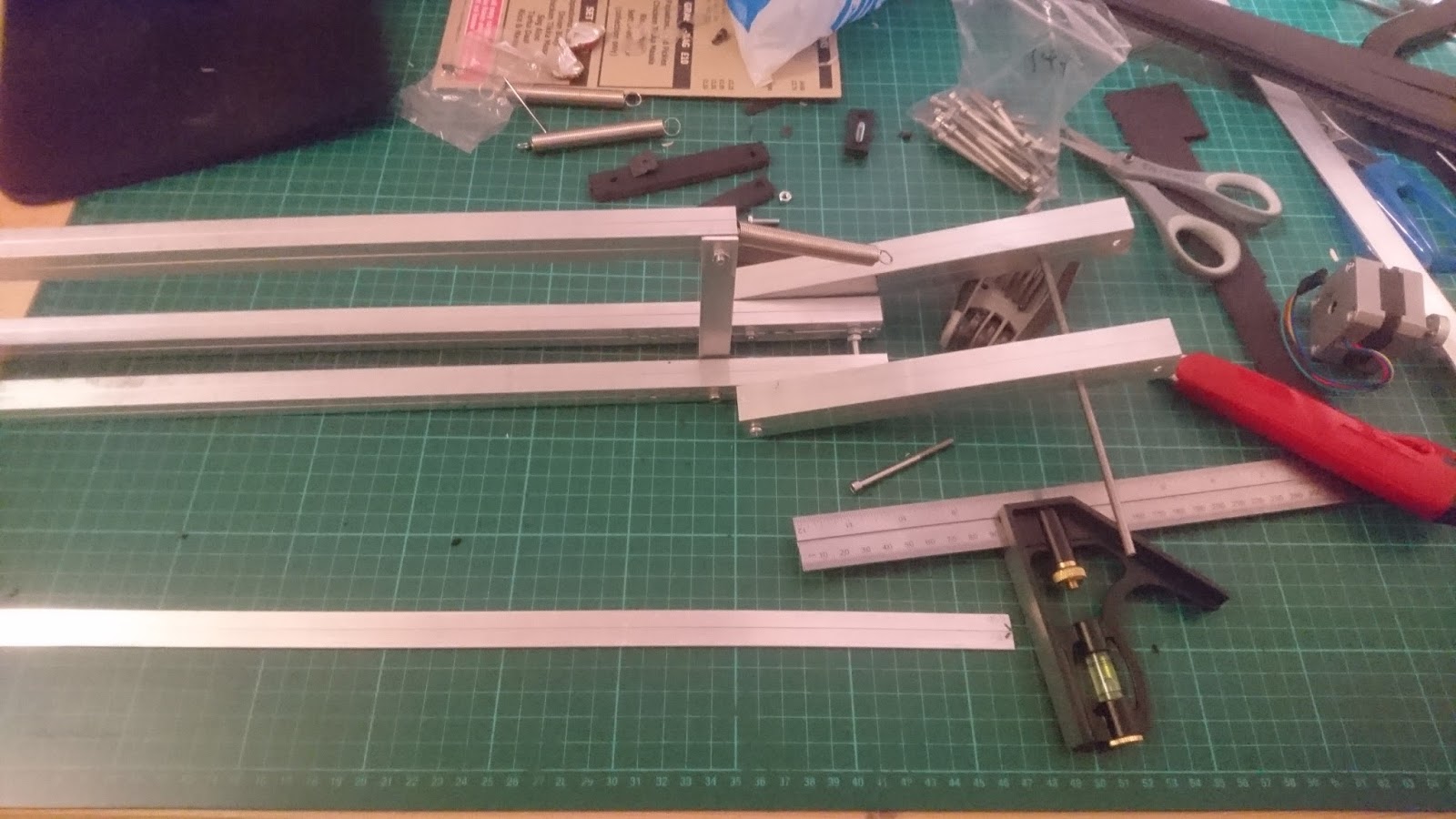
Prototype of Robot Base
During my winter term I took the physical computing module offered in the Creative Computing course. When working on the final project for this module I took the opportunity to test out the systems I was designing and considering as an option for the animatronic. I opted to build a scaled down version of the movement platform that the body of the robot will be placed on.
I have made a log of it's development here http://omnimac.blogspot.co.uk/.
This project taught me a lot of important lessons that has lead me to redesign sections of the final animatronic.