Below demonstrates the constructions and action of the new design.


After finding satisfactory dimensions I went on to draw up a design for a final metal version. The drawing in below.

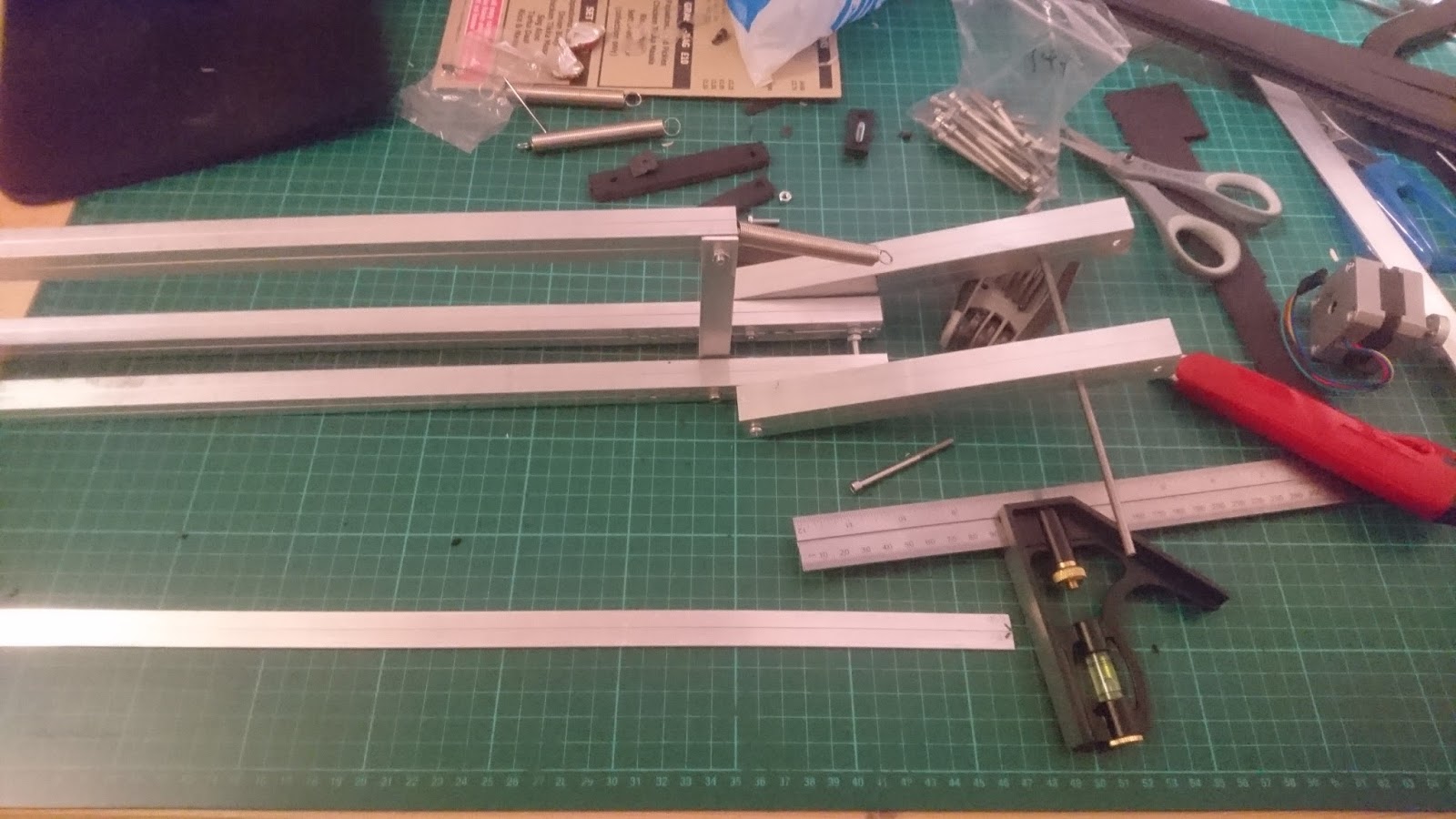
I gathered my materials which included aluminium square tubes and sheets, the appropriate fixings and any extra tools needed.

I was able to use some motors to test the actuators for the movement of this body section. They are not the appropriate strength of motor but did help me develop a refined design. I was even able to use the wireless remote control I built for the robotic base prototype.
I have started a Gitlab repo for my controller code.
http://gitlab.doc.gold.ac.uk/cjoyc002/thirdYearProject
No comments:
Post a Comment